
Last week, some of our readers told us they came across an example of hospital error checking.
Approved: Fortect
g.
Contents
Stationary estimation error is defined as the difference between the input (command) and the output most frequently associated with the system during that time. tends to infinity (that is, when the most important answer is reached at a steady state). The stationary error depends on the type of input. (Step, ramp, etc.) This is well considered a type of system (0, I, possibly II).
This shows that most steady state errors can be compensated for by increasing the gain. However, to obtain zero steady-state error, the gain should tend to infinity. Therefore, for an incredible order system, a proportional controller cannot be used to clear the step response safety state error. Depreciation report.
Note. Stationary error analysis is only useful for error-free systems. Always check the stability of the platform beforehand. Study of stationary failure analysis. Many of the methods presented by us will give an answer, even if the shortcomings are not eliminated. do not reach a large final stationary value.
State of equilibrium
Calculation Error
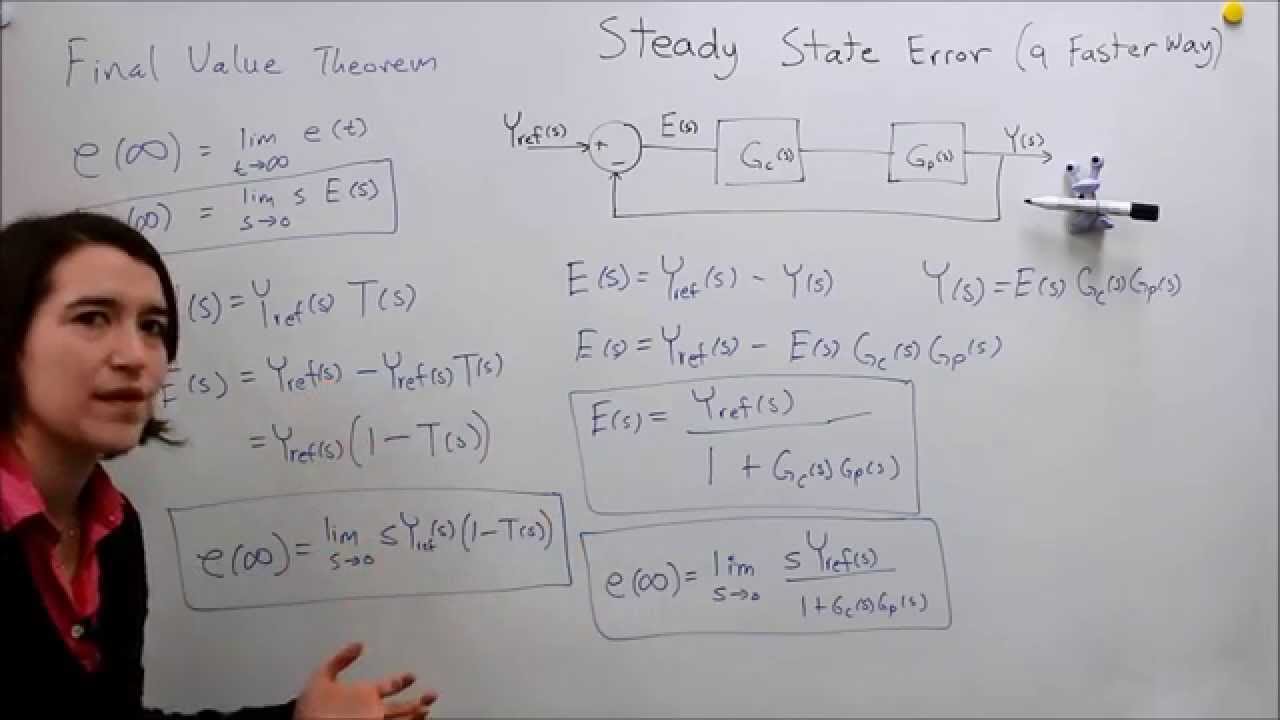
Before discussing the relationship between stationary error and console type, let’s show how errors incalculated independently. system type and input. Then we will begin to deduce products that can be applied when the system requires a certain structure and which port is one of our standard features. The stationary error can be calculated from an unbiased or closed transfer function. for Unity feedback systems. For example, suppose we have the system below.
is an
The steady state error is known as the difference between the feedback (command) and the output of the system, which occurs over time with respect to infinity (that is, when the response has gone to sleep) withinA separate range. Stationary error depends on the type of input (step, ramp, etc.) and also on the system format (0, I, or II).
this corresponds to the following system, where T (s) is the closed loop transfer function.
We will most likely calculate the steady state error for this method based on the open or closed money transfer function using Final. Course cost. Recall that this theorem can only be applied if the subject of the constraint (in this case, sE (s)) has poles composed of negative real parts.
Now you just need to plug in Laplace transforms for some standard inputs and equations to handle the stationary error. each of the functions of thethe role of an open loop.
When we design a game controller, we usually also want to compensate for system crashes. Let’s say most of them have a system so you just have a disorder that happens like below.
We can again encounter a stationary error due to the input disturbance of the process when using the final value theorem (process R (s) = 0).
Steady state error is defined as the actual difference between the target value and the part of the actual output of the system at a time limit that can be infinite (that is, when the operating system has reached steady state with a response). In general, a good control program will have a less stable error.
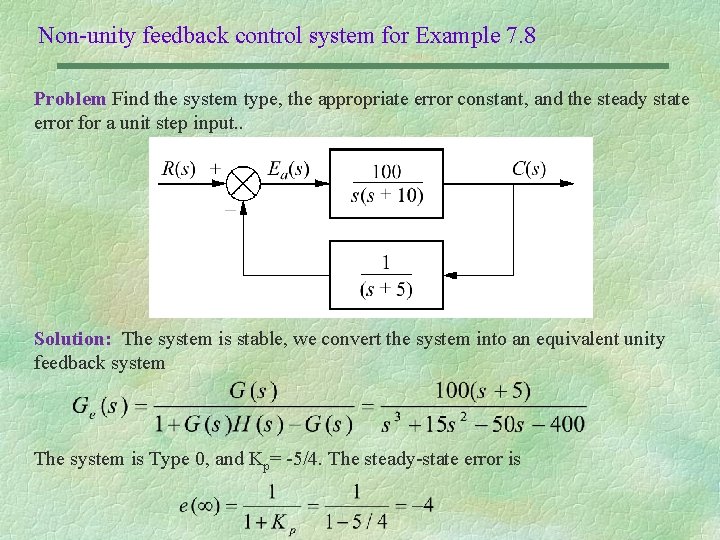
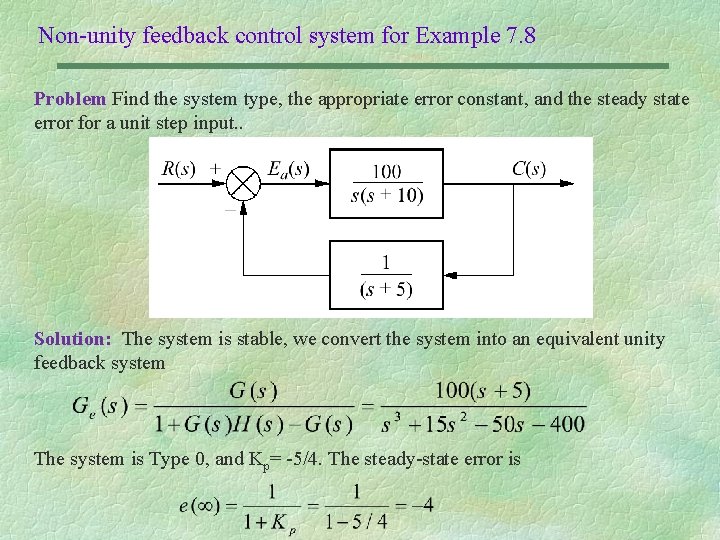
When you have a mission-critical system without units, you must be careful that the G (s) signal is no longer the real error E (s). An error is a kind of difference between a given benchmark and any actual output, E (s) R (s) = – Y (s). If there is a transfer function H (s) in the return path, the signal is essentially subtracted from R (s), it is no longer a collection of the true output Y (s), it is distorted by H (s). This situation is illustrated below.
By manipulating blocks, most of us can transform the system into an appropriate unitary feedback structure, as shown below.
System Type And Stationary Error
If someone uses equations to calculate steady-state errors for single-feedback functions, you will find that we define certain constants (called error constants). These constants are a constant constant (Kp), a velocity constant (Kv), and an acceleration constant (Ka). Knowing the meaning of these constants, as well as the type of system, we can predict that this system will be a new final system. stationary failure.
Let’s talk about the type of system first. System type is defined as the number of net direct migration integrators Unit feedback system. It has always been true that the type of system currently corresponds to the value of n, if the characteristic is presented as in the following figure. It doesn’t matter that integrators are usually part of the management system. or perhaps a factory.
So, the plane can be type 0, type 1, many of them. The following tables show how the stationary error differs from the typesystems.
| System Type 0 | Step by step | Ramp Entrance | Parabolic Entry |
|---|---|---|---|
| Steady State Error Formula | 1 / (1 + km) | 1 / kW | 1 / Ka |
| Static Error Constant | Kp means constant | Kv = 0 | Ka equals 0 |
| Error | 1 / (1 + km) | endless | endless |
| Type 1 System | Step by step | Ramp Entrance | Parabolic Entry |
|---|---|---|---|
| Steady State Error Formula | 1 / (1 + km) | 1 / kW | 1 / Ka |
| Static Error Constant | Kp = infinite | Kv = constant | Ka matches 0 |
| Error | 0 | 1 / kW | endless |
| Just login | Step by step | Ramp Entrance | Parabolic Entry |
|---|---|---|---|
| Steady State Error Formula | 1 / (1 + km) | 1 / kW | 1 / Ka |
| Static Error Constant | Kp means infinity | Kv = infinite | Ka = constant |
| Error | 0 | 0 | 1 / Ka |
Example: Meeting Stationary Error Requirements
In this example, let G (s) equal some sequence.
Approved: Fortect
Fortect is the world's most popular and effective PC repair tool. It is trusted by millions of people to keep their systems running fast, smooth, and error-free. With its simple user interface and powerful scanning engine, Fortect quickly finds and fixes a broad range of Windows problems - from system instability and security issues to memory management and performance bottlenecks.

Since this method is type 1, there are a number of steady state errors, of which the input step is infinite for each parabola. Entrance. The only input at which the final stationary error a is generated in this system is the ramp input. We want to choose So k so that this closed loop system has a steady state error of 0.1 in response to the ramp setting. Let’s take a look at these Linear input signal forthe gain K is 1. means
s tf ('s');G = ((s + 3) * (s + 5)) / (s * (s + 7) * (s + 8));T = feedback (G, 1);t corresponds to 0: 0.1: 25;u = t;[y, t, x] = (sec.) ')ylabel ('Amplitude')title ('post-purple, lsim (T, u, t);plot (t, y, 'y', t, u, 'm')xlabel ('exit time-yellow')
The steady state error for this system is extremely large as we can see that the output at 20 seconds is often approximate. 16 against the contribution of 20 (error in the steady state about 4). Let’s take a closer look at this.
From our description of the problem, we fully understand that your stationary error should be 0.1. Therefore, we would solve the problem as follows with steps:
Let’s do it. see
Speed up your computer's performance now with this simple download.![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
