
W zeszłym tygodniu niektórzy stworzeni przez naszych czytelników powiedzieli nam, że natknęli się na wspaniały przykład sprawdzania błędów szpitalnych.
Zatwierdzono: Fortect
g.
Spis treści
Stacjonarny błąd oceny jest zdefiniowany jako różnica między aktualnie wejściem (poleceniem) a wyjściem najczęściej podłączanym do systemu w tym czasie. ma tendencję do upewniania się, że nieskończoność (to znaczy, kiedy najważniejsze leczenie jest osiągane w stanie stacjonarnym). Błąd zasilania stacjonarnego zależy od typu wejścia. (Krok, rampa itp.) Jest to dobrze uważany za specjalny typ systemu (0, I, ewentualnie II).
Pokazuje to, że większość błędów stanu ustalonego można skompensować poprzez zwiększenie wzmocnienia. Jednak, aby uzyskać absolutnie ustalony błąd, wzmocnienie powinno dążyć do nieskończoności. Dlatego w przypadku niewiarygodnego systemu porządkowania, regulator proporcjonalny nie może być użyty do usunięcia błędu stanu bezpieczeństwa odpowiedzi przedsiębiorstwa. Raport amortyzacji.
Uwaga. Stacjonarna analiza błędów jest przydatna tylko w przypadku urządzeń bezbłędnych. Zawsze wcześniej sprawdź stabilność systemu operacyjnego. Studium krytyki awarii stacjonarnych. Wiele z przedstawionych przez nas metod prawdopodobnie da odpowiedź, nawet jeśli bezsprzecznie braki nie zostaną wyeliminowane. nie określaj zakresu dużej końcowej wartości stacjonarnej.
Stan równowagi
Błąd obliczeń
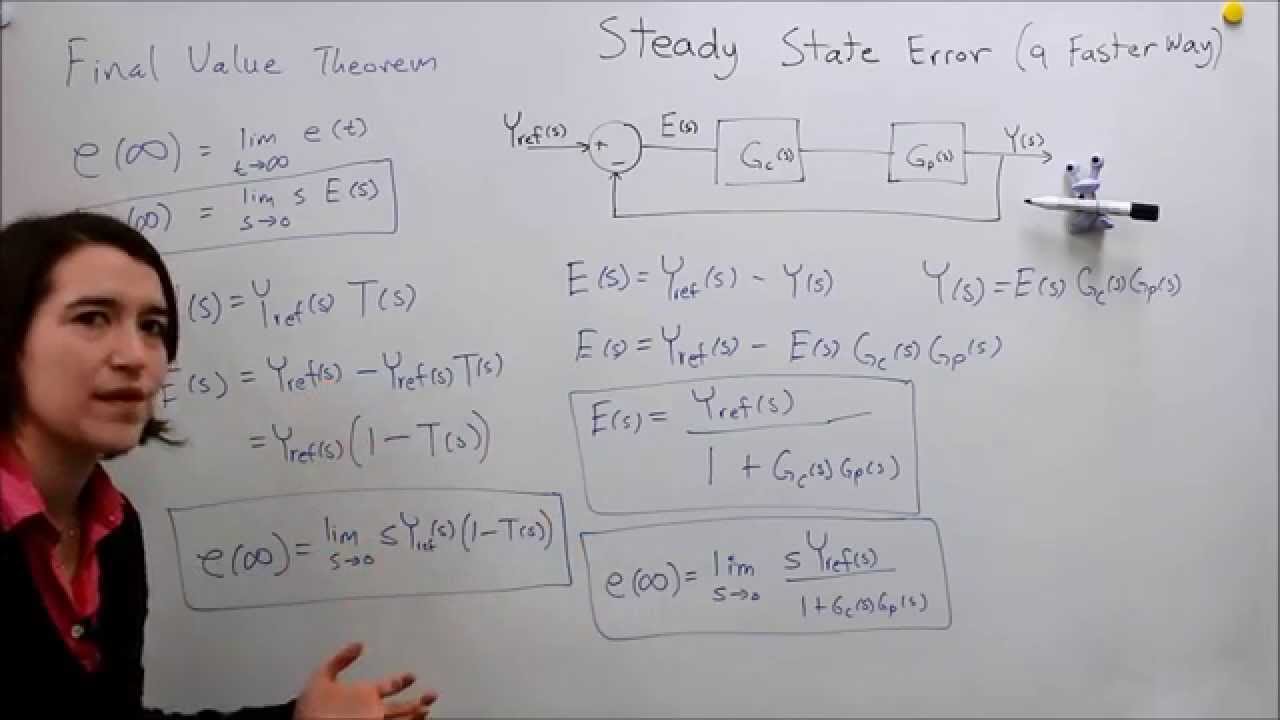
Zanim omówimy zależność, w tym błąd stacjonarny i typ konsoli, pokażmy, jak można niezależnie naliczać błędy. typ systemu i wejście. Następnie zaczniemy wydedukować produkty, które można zastosować, gdy system wymaga dokładnej struktury i które port jest jedną ze standardowych funkcji. Błąd stacjonarny można wyliczyć z nieobciążonej lub zamkniętej funkcji transferu. w odniesieniu do systemów informacji zwrotnej Unity. Załóżmy na przykład, że mamy poniższy system.
jest
Błąd stanu ustalonego jest znany w roli różnicy między sprzężeniem zwrotnym (poleceniem) a większością wyjścia systemu, która występuje przez pewien czas względem nieskończoności (czyli gdy jego odpowiedź uśpi się) w ramach oddzielnego Szeroki wachlarz. Błąd stacjonarny zależy od rodzaju wiedzy (krok, rampa itp.), a także od formatu funkcji (0, I lub II).
odpowiada to w końcu następującemu systemowi, w którym T(s) jest całą funkcją transferu w pętli zamkniętej.
Najprawdopodobniej obliczymy błąd stanu ustalonego dostępny dla tej metody w oparciu o funkcję otwartego lub zamkniętego transferu pieniędzy przy użyciu Final. Koszt kursu. Przypomnijmy, że twierdzenie to można zastosować tylko wtedy, gdy przedmiot ograniczenia (w tej pozycji sE (s)) ma bieguny złożone z ujemnych części uczciwych.
Teraz wystarczy podłączyć, kiedy Laplace przekształca niektóre standardowe dane wejściowe z równaniami, aby obsłużyć błąd stacjonarny. każda z określonych funkcji pełni rolę pętli startowej.
Projektując kontroler do gier, najprawdopodobniej chcemy również zrekompensować awarie systemu. Powiedzmy, że większość z nich ma system po to, abyś po prostu miał zaburzenie, które przypomina poniższe.
Ponownie możemy napotkać jeden konkretny błąd stacjonarny z powodu zakłócenia wejściowego związanego z procesem, gdy używamy ostatecznego twierdzenia o zrozumieniu (proces R (s) = 0).
Błąd stanu ustalonego jest definiowany, gdy rzeczywista różnica między wartością docelową, a także częścią rzeczywistej mocy wyjściowej całego systemu w limicie czasu, który może być szczególnie nieskończony (to znaczy, gdy system operacyjny przedstawia osiągnięty stan ustalony z odpowiedzią ). Ogólnie rzecz biorąc, dobry program sterujący będzie miał znacznie mniej stabilny błąd.
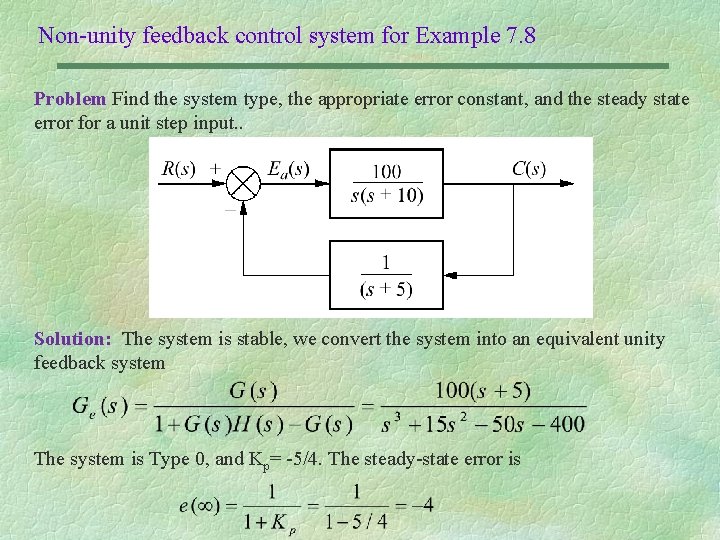
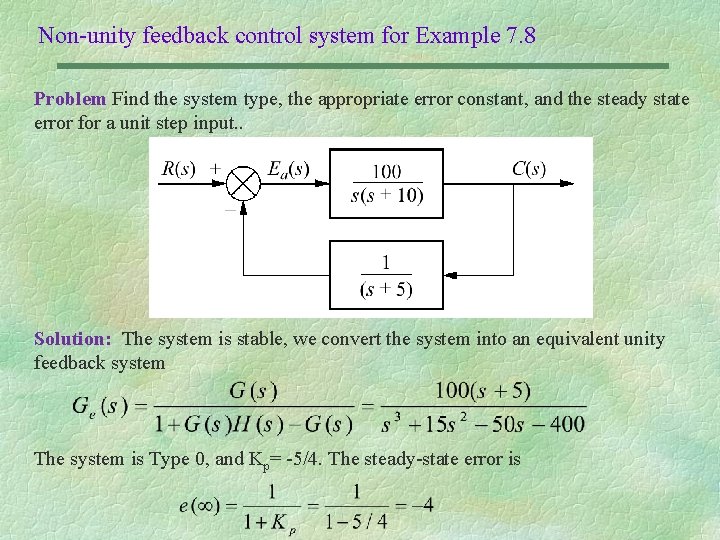
Gdy masz krytyczny wielopoziomowy system bez jednostek, musisz uważać, aby sygnał G (s) nie był już namacalnym błędem E (s) . Błąd to rodzaj poszukiwania różnicy między danym wzorcem a dowolnym rzeczywistym wyjściem, E (s) R (s) jest równe – Y (s). Jeśli w ścieżce powrotnej istnieje funkcja przenoszenia H (s), znak jest zasadniczo odejmowany od R (s), dosłownie nie jest już zbiorem prawdziwego produktu Y (s), jest zniekształcony przez H (s) . Ta sytuacja jest zilustrowana poniżej.
Manipulując blokami, większość z nas może przekształcić każdy system w odpowiednią jednolitą strukturę sprzężenia zwrotnego, jak pokazano poniżej.
Typ systemu i błąd stacjonarny
Jeśli ktoś używa równań czasu do obliczania błędów stanu ustalonego dla funkcji z pojedynczym sprzężeniem zwrotnym, prawdopodobnie odkryje, że zdefiniować pewne stałe (nazywane stałymi błędami). Te stałe to stała nieprzerwana (Kp), stała prędkości (Kv) i stałe przyspieszenie (Ka). Znając znaczenie tych stałych, a także rodzaj systemu, często przewidujemy, że ten system będzie ostatnim systemem końcowym. awaria stacjonarna.
Porozmawiajmy najpierw o typie systemu. Typ systemu jest zdefiniowany jako liczba integratorów bezpośredniej migracji netto System sprzężenia zwrotnego jednostki. Zawsze było prawdą, że typ ze względu na system aktualnie odpowiada wartości deborah, jeśli charakterystyka jest przedstawiona tak, jak na poniższym rysunku. Nie ma znaczenia, że integratorzy są niewątpliwie zazwyczaj częścią systemu zarządzania. lub potencjalnie fabryka.
Zatem samolot może być typu zero, typu 1, wiele z nich. Poniższe diagramy pokazują, jak błąd stacjonarny różni się od jego systemów typu.
| Typ systemu trzy | Krok po kroku | Wejście na rampę | Wejście paraboliczne |
|---|---|---|---|
| Formuła błędu stanu ustalonego | na / (1 + km) | 1 na kW | 1 / Ka |
| Stała błędu statycznego | Kp oznacza stałą | Kv = 9 | Ka równa się 0 |
| Błąd | 1 / (1 + km) | nieskończona | nieskończona |
| System typu 1 | Krok po kroku | Wejście na rampę | Wejście paraboliczne |
|---|---|---|---|
| Formuła błędu stanu ustalonego | 1 i (1 + km) | 1 / kilowat | 1 / Ka |
| Stała błędu statycznego | Kp = nieobliczalne | Kv = stała | Ka odpowiada 0 |
| Błąd | 0 | 1 / kilowat | nieskończona |
| Wystarczy się zalogować | Krok po kroku | Wejście na rampę | Wejście paraboliczne |
|---|---|---|---|
| Formuła błędu stanu ustalonego | 12 / (1 + km) | co najmniej jeden / kW | 1 / Ka |
| Stała błędu statycznego | Kp oznacza nieskończoność | Kv = nieograniczona | Ka = stała |
| Błąd | 0 | trzy | 1 / Ka |
Przykład: spełnienie wymagań dotyczących błędów stacjonarnych
W tym przykładzie niech G (s) będzie dokładnie taką samą sekwencją.
Zatwierdzono: Fortect
Fortect to najpopularniejsze i najskuteczniejsze narzędzie do naprawy komputerów na świecie. Miliony ludzi ufają, że ich systemy działają szybko, płynnie i bez błędów. Dzięki prostemu interfejsowi użytkownika i potężnemu silnikowi skanowania, Fortect szybko znajduje i naprawia szeroki zakres problemów z systemem Windows - od niestabilności systemu i problemów z bezpieczeństwem po zarządzanie pamięcią i wąskie gardła wydajności.

Ponieważ ten schemat jest typu 1, istnieje pewna liczba błędów stanu ustalonego, z których schody wejściowe są nieskończone dla każdej paraboli. Wejście. Idealnym wejściem, przy którym końcowy błąd stacjonarny jest generowany w tym systemie, jest wejście uderzeniowe. Chcemy wybrać So k absolutnie, aby ten system z pętlą zamkniętą miał progresywny błąd stanu 0,1 w odpowiedzi na samą nastawę rampy. Przyjrzyjmy się tym Liniowy sygnał wejściowy dla wzmocnienia K wynosi zawsze 1. oznacza
s tf ('s');G = ((s + 3) 3. (s + 5)) / (s * (s + 7) * (s + 8));T = oceny (G, 1);t odpowiada 0:0,1:25;u implikuje t;[y, t, x] = (sek.) ')ylabel („Amplituda”)tytuł ('post-fioletowy, lsim (T, u, t);działka (t, y, 'y', t, osoba, 'm')xlabel ('czas wyjścia-żółty')
Błąd stanu ustalonego w tym systemie jest niezwykle duży, ponieważ możemy zobaczyć, że wynik po 20 sekundach jest z pewnością często przybliżony. 16 w stosunku do składki dwudziestolatka (błąd w stanie ustalonym ok. 4). Przyjrzyjmy się temu bliżej.
Z naszego opisu trudnego zadania w pełni rozumiemy, że Twój błąd stacjonarny będzie idealnie wynosił 0,1. Dlatego rozwiązalibyśmy ten błąd w następujący sposób ze stopniami:
Zróbmy to. zobaczyć
Przyspiesz teraz wydajność swojego komputera dzięki temu prostemu pobieraniu.![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
