
Na semana passada, alguns de seus leitores nos disseram que se depararam com uma situação a ponto de verificação de erros em hospitais.
Aprovado: Fortect
g.
Conteúdo
O erro de especulação estacionária é definido como a diferença entre o conhecimento (comando) e a saída mais frequentemente associada quando se trata do sistema durante esse tempo. tende a ser capaz de infinito (isto é, quando a resposta mais importante agora é alcançada em um estado estacionário). O erro parado depende do tipo de entrada. (Step, slam, etc.) Isso é bem considerado um tipo de sistema (0, I, possivelmente II).
Isso mostra que erros máximos de estado estacionário podem ser compensados enquanto aumenta o ganho. No entanto, para obter absolutamente nada de erro de estado estacionário, o ganho deve tender ao infinito. Portanto, para um sistema de pedido incrível, um regulador proporcional não pode ser usado para limpar o erro de estado de segurança da réplica de etapa. Relatório de depreciação.
Observação. A análise de erro estacionária só é útil para sistemas sem erros. Sempre verifique a estabilidade da plataforma com antecedência. Estudo de análise de falha estacionária. Muitos dos métodos apresentados por nós terão uma resposta, mesmo que as deficiências não sejam realmente eliminadas. não alcance um bom valor estacionário final grande.
Estado de equilíbrio
Erro de cálculo
Antes de discutir a relação entre o erro corrigido e o tipo de console, vamos mostrar como os problemas são calculados independentemente. tipo de sistema e entrada. Então todos nós começaremos a deduzir produtos que podem ser mais aplicados quando o sistema requer um certo desenvolvimento e quais porta é um de nossos recursos padrão. O erro estacionário pode ser calculado em uma função de transferência imparcial ou fechada. para sistemas de feedback Unity. Por exemplo, suponha que temos seu sistema abaixo.
é um
O erro de estado estacionário é conhecido como a diferença entre o feedback (comando) e o resultado do sistema, que ocorre ao longo do tempo usando o respeito ao infinito (isto é, quando o tipo de resposta adormece) dentro de uma faixa separada. O erro estacionário depende do tipo de conector (degrau, rampa, etc.) e também do formato dos dados do sistema (0, I ou II).
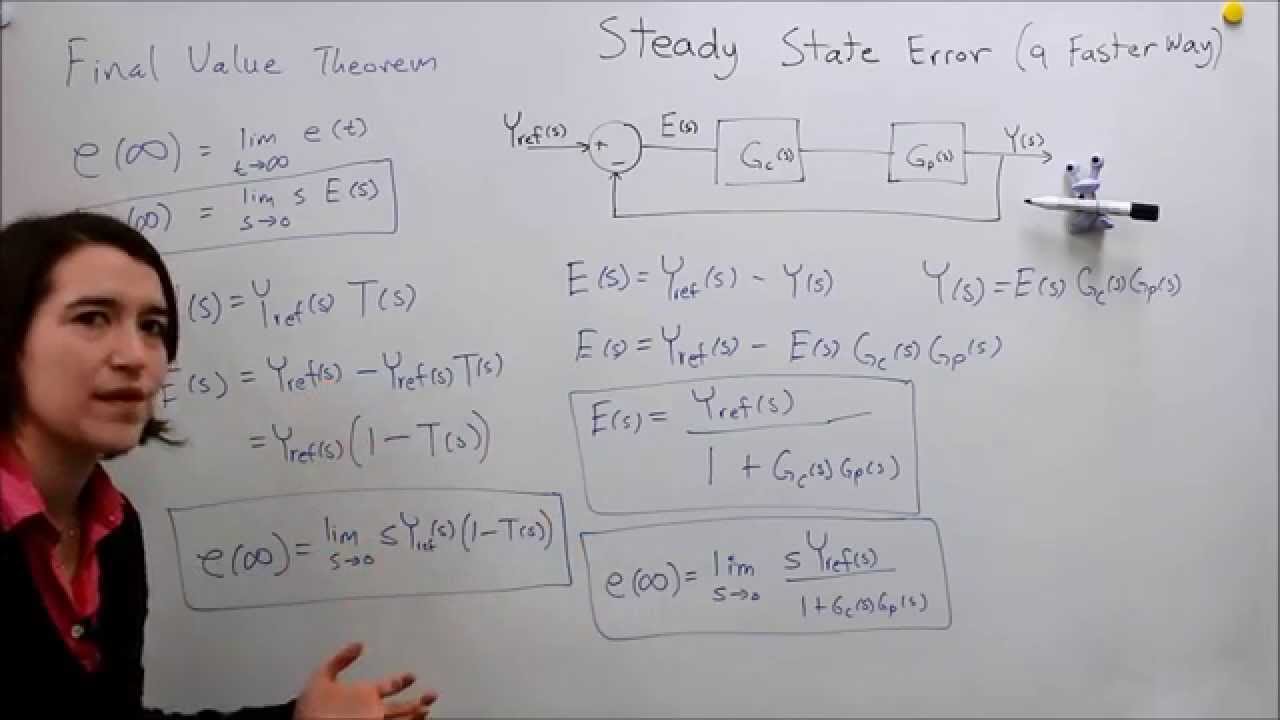
Isso corresponde aos seguintes sistemas, onde T (s) é a função de transferência de loop segura.
Como regra, provavelmente calcularemos o erro de estado estacionário para este método de habilidade com base na função de transferência aberta ou fechada usando Final. Custo do curso. Lembre-se de que esse teorema só pode ser aplicado se todos os sujeitos da restrição (neste caso, ze (s)) tiverem pólos compostos de partes tradicionais negativas.
Agora você só precisa conectar as transformadas de Laplace para algumas entradas e equações padrão se quiser lidar com o erro estacionário. cada um dos processos do papel de um circuito aberto.
Quando projetamos um controlador de jogo, geralmente e também queremos compensar as falhas do sistema. Vamos afirmar que a maioria deles tem um sistema então você só tem que ter um transtorno que acontece apreciar a seguir.
Podemos encontrar novamente um erro interrompido devido à perturbação de entrada de como o processo ao usar o teorema do valor final (processo R (s) = 0).
O erro de estado estacionário é definido como toda a diferença real entre o valor de destino e sua parte da saída real do processo em um limite de tempo que pode ser interminável (ou seja, quando o sistema operacional atinge o estado estacionário com uma resposta). Em geral, um bom programa de controle adequado terá um erro menos imuável.
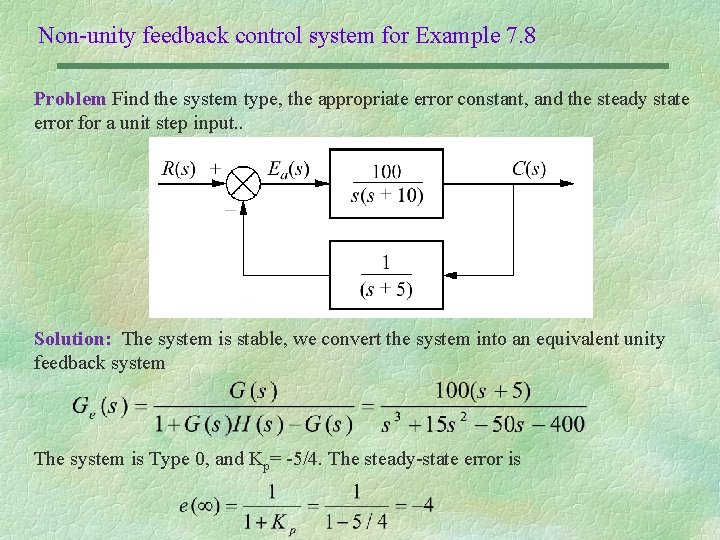
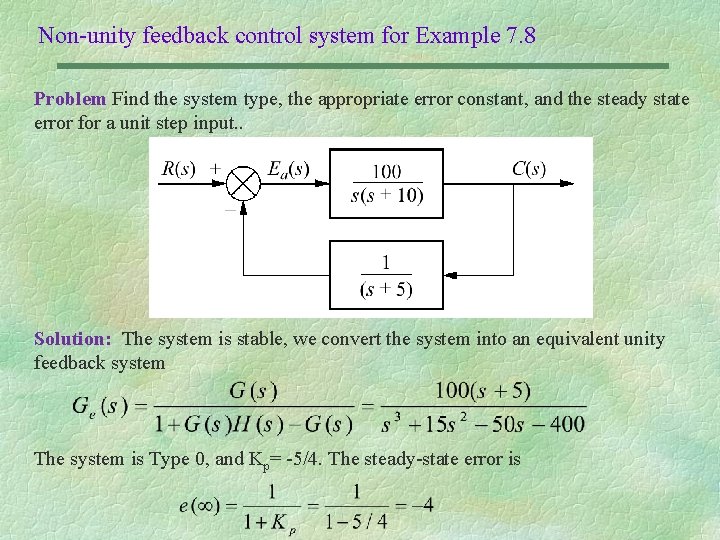
Quando você tem um sistema de missão crítica e não envolve unidades, você deve ter cuidado para que o sinal G (s) não seja mais o erro substancial E (s). Um erro é um tipo junto com a diferença entre um determinado benchmark e qualquer saída original, E (s) R (s) = – Y (s). Se houver uma função de transferência H (s) no caminho de retorno, o sinal passa a ser essencialmente subtraído de R (s), não é por mais tempo uma coleção da saída verdadeira Y (s), é distorcido por H ( s). Essa situação é ilustrada a seguir.
Ao alterar os blocos, a maioria de nós pode transformar a plataforma em uma estrutura de feedback unitária apropriada, conforme listado abaixo.
Tipo de sistema e erro estacionário
Se alguém usa equações para descobrir erros de estado estacionário para funções de feedback único, você tentará descobrir que nós definir certas constantes (chamadas constantes de mensagem de erro). Essas constantes são uma constante constante (Kp), uma grande constante de velocidade (Kv) e uma aceleração absolutamente consistente (Ka). Sabendo o significado dessas constantes, bem como o tipo de sistema, podemos verificar que esse sistema será um novo sistema final. falha estacionária.
Vamos falar primeiro sobre o tipo de sistema. O tipo de sistema é definido como o número de integradores gerais de migração direta Sistema de feedback da unidade. Recentemente, sempre foi verdade que o tipo de estratégia atualmente corresponde ao valor de n, onde a característica é apresentada como na figura seguinte. Não importa que os integradores provavelmente façam parte do sistema de gerenciamento. ou talvez qualquer tipo de fábrica.
Então, o plano pode ser do tipo 0, intervalo 1, muitos deles. As tabelas a seguir ensinam como o erro estacionário difere de um novo sistema de tipos.
Exemplo: Atendendo aos requisitos de erro estacionário
Neste exemplo, seja G (s) igual a uma sequência numérica.
Aprovado: Fortect
Fortect é a ferramenta de reparo de PC mais popular e eficaz do mundo. Milhões de pessoas confiam nele para manter seus sistemas funcionando de forma rápida, suave e livre de erros. Com sua interface de usuário simples e mecanismo de verificação poderoso, o Fortect localiza e corrige rapidamente uma ampla gama de problemas do Windows, desde instabilidade do sistema e problemas de segurança até gerenciamento de memória e gargalos de desempenho.

Como esse método realmente tipo 1, há uma série de erros de estado estático, dos quais a etapa de entrada era infinita para cada parábola. Entrada. A única entrada em que o erro estacionário final a é gerado literalmente neste sistema é o esforço de rampa. Queremos escolher So k para que a ideia deste sistema de malha fechada tenha um erro de área constante de 0,1 em resposta à configuração de inclinação. Vamos dar uma olhada nestes O sinal de entrada linear para o ganho K é 1. significa
verts tf ('s');G = ((s + 3) 7. (S + 5)) / (s * (s + 7) 6. (S + 8));T = feedback (G, 1);t corresponde a 0: 0,1: 25;u = t;[y, testosterona, x] = (seg.) ')ylabel ('Amplitude')título ('pós-púrpura, lsim (T, u, t);plot (t, y, 'y', t, u, 'm')xlabel ('tempo de saída - amarelo')
O erro de estado estacionário para este sistema de método é extremamente grande, pois podemos observar que a saída em 20 segundos é repetidamente aproximada. 16 contra a contribuição de aproximadamente vinte (erro no estado estacionário cerca de 4). Vamos examinar isso mais de perto.
Pela nossa descrição do problema, todos entendem perfeitamente que o seu erro estacionário deve crescer para 0,1. Portanto, resolveríamos o problema da seguinte forma com etapas:
Vamos lá. Vejo
Acelere o desempenho do seu computador agora com este simples download.![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
